

希望能成为布道师和生活家。希望能成为布道师和生活家。



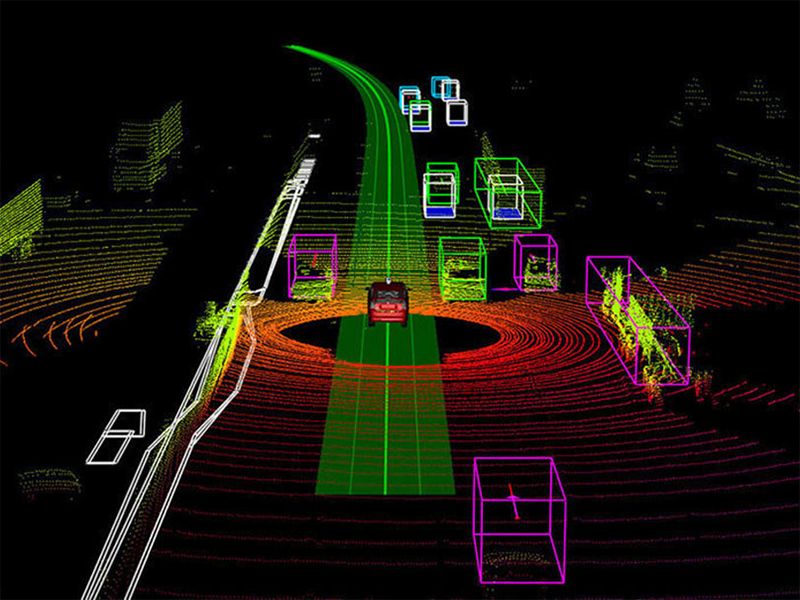
无人驾驶入门2:高精度地图
无人驾驶入门之高精度地图:了解高精度地图的实现逻辑,这是Apollo定位、感知、规划模块的基础。

无人驾驶入门1:无人驾驶概览
无人驾驶入门第一课,介绍了无人驾驶车的关键部分以及Apollo的架构,带大家入门无人驾驶技术。
聊聊用机器人做无人驾驶
无人驾驶是机器人在帮我们开车?今天我们来聊聊机器人的难、无人驾驶的容易以及无人驾驶的实现方式,顺便给让机器人给我们开车的无人驾驶公司做个广告:)
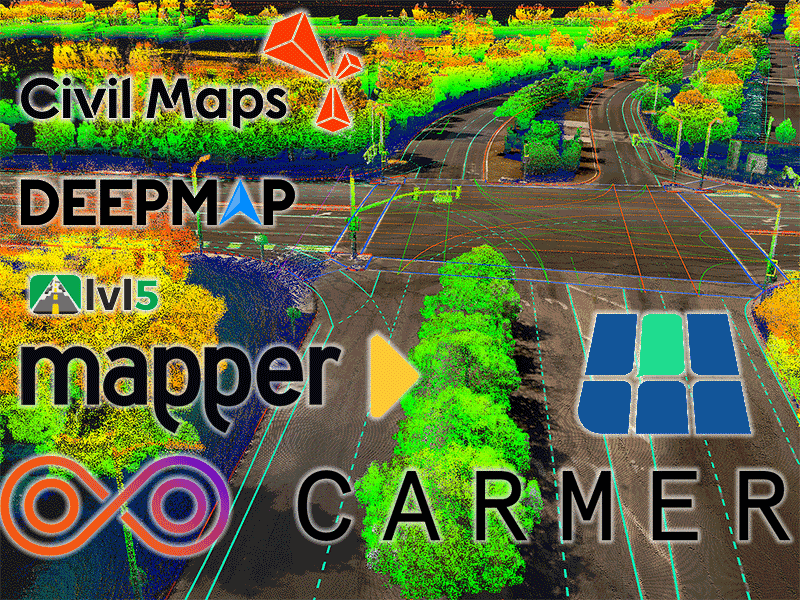
透过国外初创公司看高精度地图难题
透过Civil Maps、DeepMap、lvl5、Carmera、Mapper、Ushr这几家国外初创公司,了解高精度地图的难题,通过他们的采集形式、产品优势以及商业模式,给我们在高精度地图问题的解决办法上带来启发。

百度Apollo无人驾驶入门课程下载
本视频作为无人驾驶的入门课程,超棒,可以让你系统性的了解无人驾驶,获得一个全面的知识体系认知。课程中介绍了无人驾驶的高精度地图、定位、感知、预测、规划、控制这几个方面,视频虽然简短,每个两三分钟,但确实是现实的、不骗人的、让你少走弯路的课程。总之,这是我(现阶段)见过的最佳无人驾驶入门课程,视频精美,制作优良,良心之作,值得推荐。
关于高精度地图定义的探讨
高精度地图是自动驾驶/无人驾驶的重要组成,那究竟什么是高精度地图?
网上找了两个关于高精度地图的定义,如下:
定义一:高精细地图是指高精度、精细化定义的地图,其精度需要达到分米级才能够区分各个车道,如今随着定位技术的发展,高精度的定位已经成为可能。而精细化定义,则是需要格式化存储交通场景中的各种交通要素,包括传统地图的道路网数据、车道网络数据、车道线以和交通标志等数据。
使用GPStracker自建卫星定位跟踪平台
经常有人问,我能不能手机定位跟踪谁谁谁,我能不能定位跟踪我的车,等等问题。
话说不难,确实,需要客户端和服务端结合起来就能实现。
今天就给大家介绍一下GPStracker,一套开源的定位跟踪系统,有手机端和服务端。
Google Maps瓦片(tile)地图文件下载(1-11层级)
整理硬盘时,发现一份去年下载的谷歌地图瓦片文件,整理并分享给大家。
地图来源:Google Maps(应该是国内谷歌地图)
年轻人如何在上海购买人生中的第一套房?
从房贷计算、凑够首付、选择板块到具体落地执行,说说年轻人在上海购买房的个人思路,同时附上个人的忠告,愿为在上海刚需买房的年轻人带来一点点的帮助,也祝在上海奋斗的年轻人们早日上车。